
Балансировка валов снижает 1X-вибрацию за счет коррекции распределения массы ротора. Практический выбор сводится к двум вопросам: достаточно ли одноплоскостной коррекции и достигнут ли приемочный уровень остаточного дисбаланса.
- Метод выбирают по типу дисбаланса, геометрии ротора (L/D), режиму и требуемому классу качества.
- Для динамической схемы обязательны фазовые измерения относительно тахо-метки.
- Решение принимают по численным критериям, а не по одному «удачному» пуску.
Что такое балансировка вала и какой вопрос она решает
Балансировка ротора, это корректировка масс, при которой ось вращения максимально приближается к главной центральной оси инерции. Целью является уменьшение центробежных сил от неуравновешенности и связанной вибрации на опорах.
Не смешивайте термины. Балансировка вала это технологическая процедура. Балансировочный вал в ДВС это отдельный конструктивный узел двигателя.
Термины и обозначения
Дисбаланс U - произведение неуравновешенной массы на радиус: U = m·r.
Остаточный дисбаланс Ures - дисбаланс после коррекции.
Остаточный удельный дисбаланс eper - допустимый остаточный дисбаланс на единицу массы ротора.
Корректирующая масса mcorr - масса, добавляемая или удаляемая в выбранной плоскости и угле.
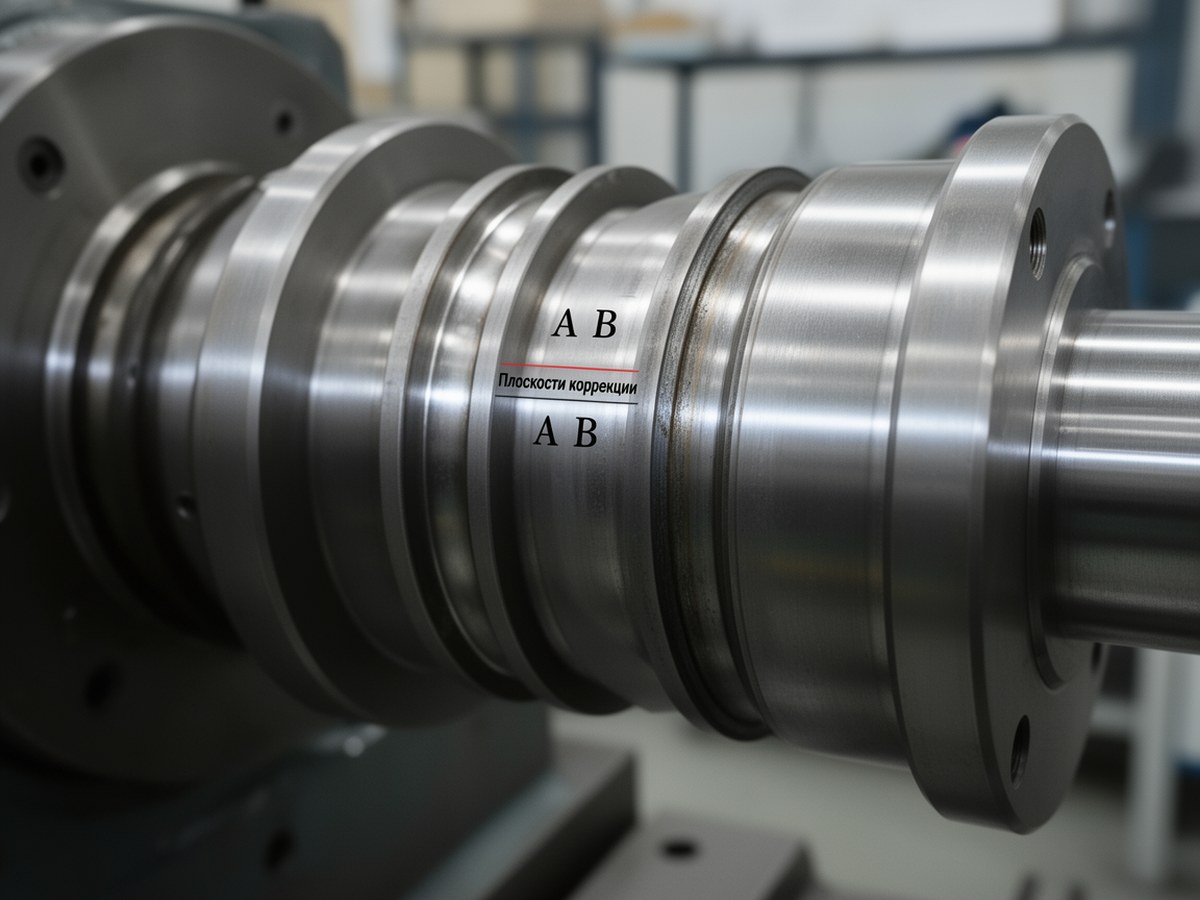
Плоскость измерения - место установки датчика или оценки вибрации. Плоскость коррекции - сечение, где вносят массу.
Фазовый угол φ - угол вектора 1X относительно тахо-метки при фиксированном направлении отсчета.
Виды дисбаланса и диагностические признаки
| Тип | Физический смысл | Признак на двух опорах | Коррекция |
|---|---|---|---|
| Статический | Смещение центра масс от оси | Опоры в фазе (приближенно) | Часто 1 плоскость |
| Моментный | Пара дисбалансов в разных сечениях | Опоры в противофазе | 2 плоскости |
| Динамический | Комбинация статического и моментного | Смешанная фазовая картина | 2 плоскости и более |
| Квазистатический | Частный случай динамического | Промежуточные признаки | Обычно 2 плоскости |
Термин «невязка» используйте только как разницу между целевым и фактическим результатом после коррекции.
Выбор метода: статическая или динамическая балансировка
Когда допустима статическая
- Короткий ротор, ориентир L/D < 0,5.
- Низкие или умеренные обороты.
- Нет устойчивой противофазы на опорах.
Когда нужна динамическая
- L/D ≳ 0,5 или масса распределена по длине.
- Рабочий диапазон скоростей широкий.
- Есть требования по классу G и низкой 1X-вибрации.
L/D служит ориентиром. Окончательное решение подтверждают фазовой диагностикой.
Как выбирать плоскости коррекции
- Выберите плоскости A и B по возможности ближе к опорам, но в зонах с технологическим доступом.
- Сохраняйте одинаковый радиус внесения массы в каждой плоскости, либо явно учитывайте разный радиус в расчете.
- Плоскости должны «управлять» измеряемыми опорами: пробная масса в A и B должна давать различимые фазо-амплитудные отклики.
- Избегайте зон с риском ослабления детали, нагрева или отрыва груза.
- Для гибких и длинных роторов проверяйте, достаточно ли двух плоскостей на целевой скорости.
Схема выбора плоскостей A/B
Поставьте схему сразу после пошагового списка, чтобы связать правила выбора с геометрией ротора.
Статическая балансировка: процедура и ограничения
Статическая балансировка - одноплоскостная коррекция, обычно на призмах или роликах. Определяют тяжелую сторону, затем добавляют массу напротив или удаляют материал в тяжелой зоне.
Метод не устраняет моментный компонент и не заменяет динамическую балансировку длинных роторов.
Динамическая балансировка: двухплоскостная коррекция и метод пробной массы
Для двухплоскостной схемы расчет выполняют в комплексной форме: амплитуда и фаза объединяются в один вектор.
Здесь A0 - комплексные вибрации до коррекции на двух опорах, α - матрица коэффициентов влияния из пробных пусков, Ucorr - комплексные корректирующие дисбалансы в плоскостях A/B. После расчета Ucorr переводят в массу: m = |Ucorr|/r.
Упрощение вида mcorr ≈ mtrial·A0/ΔA допустимо только для одноплоскостного случая при векторной записи.
Допуски балансировки по ISO 21940
В расчетах применяют класс качества G и частоту вращения n.
Обозначения: eper - мкм, G - мм/с, n - об/мин, M - кг, Uper - г·мм.
| Класс | Типичный уровень | Применение |
|---|---|---|
| G1–G2.5 | Высокая точность | Скоростные роторы |
| G6.3 | Промышленный стандарт | Общепромышленные приводы |
| G16+ | Менее жестко | Тихоходные узлы |
Короткий расчетный пример
Дано: M = 25 кг, n = 3000 об/мин, класс G2.5.
eper = 9549·2.5/3000 = 7,96 мкм.
Uper = 7,96·25 = 199 г·мм.
Если целевой остаток условно делят поровну между двумя плоскостями и радиус внесения r = 100 мм, ориентировочно m ≈ (199/2)/100 ≈ 1,0 г на плоскость. Точное значение берут из матрицы коэффициентов влияния.
Оборудование и измерительный контур
| Элемент | Назначение | Что критично |
|---|---|---|
| Станок для балансировки валов | Вращение и регистрация реакции | Жесткость, диапазон масс, точность фазового канала |
| Датчики вибрации | Амплитуда и фаза 1X | Повторяемая установка и ориентация |
| Тахометр | Опорный угол | Стабильная метка без пропусков |
| ПО | Расчет α и Ucorr | Единицы, знак угла, направление вращения |
Балансировка in-situ: возможности и пределы
In-situ применяют для крупногабаритных или недемонтируемых агрегатов. Преимущество метода в том, что учитываются реальные условия опор, муфт и фундамента.
Стоп-условия для продолжения балансировки до ремонта: нестабильная фаза 1X, выраженные субгармоники, дефекты подшипников, ослабление крепежа, признаки трения ротора.
Верификация результата и типовые ошибки
- Выполнить 2–3 контрольных пуска в одинаковом режиме.
- Проверить повторяемость: разброс амплитуды 1X обычно не более 10%, фазы не более 10°.
- Подтвердить, что Ures ≤ Uper (или e_res ≤ eper для выбранного G).
- Проверить тренд вибрации в ближайшем эксплуатационном интервале.
| Проблема | Причина | Действие |
|---|---|---|
| Фаза плавает | Тахо-ошибка, люфт, резонанс | Проверить тахо, крепления, рабочую скорость |
| Слабое снижение вибрации | Неверные плоскости/радиус | Пересчитать α, проверить геометрию A/B |
| Эффект пропал | Ослабление груза, смена режима | Проверить фиксацию и повторить контроль |
Что балансировка не исправляет
Балансировка не устраняет несоосность, дефекты подшипников, ослабление фундамента, геометрические биения и трение ротора. Эти причины устраняют ремонтом и юстировкой до или параллельно балансировке.



