Мониторинг вибрации длинных валов это система измерений и анализа, которая показывает, как ведет себя вал или длинный ротор в рабочих режимах. В отличие от короткого жесткого ротора, длинный вал заметно прогибается, имеет собственные формы колебаний и может проходить через критические скорости вращения. Поэтому для него важны не только общие уровни вибрации, но и относительное перемещение вала, фаза, орбита, осевое положение и связь сигнала с частотой вращения.
- Системы мониторинга вибрации длинных валов проектируют под конкретную машину: турбоагрегат, компрессор, насосную линию, бумагоделательную машину или прокатный стан.
- Основные точки контроля располагают в зонах подшипниковых опор; дополнительные точки в пролете применяют только при технической возможности и понятной диагностической задаче.
- Для валов на подшипниках скольжения особенно важны бесконтактные датчики относительного перемещения, фазовая метка и анализ орбиты.
Что такое мониторинг вибрации длинного вала
Длинным в инженерном смысле считают вал или ротор, для которого существенны гибкость, прогиб, моды колебаний и критические скорости вращения. Такая машина может иметь несколько опор, протяженные пролеты, участки с разной жесткостью, муфты, рабочие колеса, диски или барабаны. Вибрационная картина зависит от нагрузки, температуры, смазки, состояния опор и режима разгона.
Задача мониторинга состоит в том, чтобы получать повторяемые измерения, отделять нормальное поведение оборудования от признаков развивающегося дефекта и вовремя передавать информацию в эксплуатацию. В нормативном контексте для таких измерений учитывают ГОСТ ИСО 10817-1-2002, где рассматриваются системы снятия сигналов относительной и абсолютной вибрации вращающихся валов. Практически важное следствие: применение двух радиальных датчиков в одной плоскости измерения под углом 90 градусов для оценки траектории и среднего положения вала.
Какие параметры контролируют
Один параметр не описывает всю динамику длинного ротора. Перемещение показывает фактическое смещение вала относительно корпуса подшипника. Скорость удобна для оценки общей корпусной вибрации в среднечастотной области. Ускорение чувствительно к высокочастотным процессам и дефектам подшипников качения. Фаза и тахометка нужны для синхронного анализа: они позволяют отделить 1X, 2X и другие гармоники от несинхронных составляющих.
Относительная вибрация вала
Измеряется в мкм бесконтактными датчиками перемещения. Полезна для роторов на подшипниках скольжения, оценки орбиты, среднего положения центра вала и радиального зазора.
Абсолютная вибрация опоры
Измеряется акселерометрами или датчиками скорости на корпусе подшипника. Показывает, как вибрация передается на опорную конструкцию, фундамент и корпус машины.
Осевое положение
Контролируется отдельным каналом перемещения. Важно для машин с упорными подшипниками, осевыми силами, рабочими колесами и риском контакта вращающихся деталей.
Спектр и орбита
Спектр показывает частотный состав сигнала, а орбита описывает траекторию движения вала в плоскости подшипника при двух радиальных датчиках, установленных под углом 90 градусов.
Виды систем контроля
Контроль вибрации вала может быть периодическим, диагностическим или защитным. Эти уровни различаются не только оборудованием, но и последствиями решения: от записи тренда до автоматического останова машины.
| Вид контроля | Как собирают данные | Где применяют | Ограничения |
|---|---|---|---|
| Маршрутный виброконтроль | Периодические измерения переносным прибором | Оборудование средней критичности, плановое обслуживание, первичная диагностика | Не видит быстрые переходные события между обходами |
| Стационарный мониторинг состояния | Постоянная или регулярная запись стационарными датчиками | Критичные линии, мониторинг состояния ротора, агрегаты с дорогим простоем | Требует настройки трендов, архива и регламента проверки каналов |
| Защитная система | Непрерывный контроль с предупредительными и аварийными уставками | Турбомашины, генераторы, компрессоры, опасные технологические узлы | Основная задача: защита и останов при опасном уровне; диагностику система не заменяет |
Эти уровни часто дополняют друг друга. Защита быстро реагирует на опасное превышение, мониторинг состояния помогает анализировать тренды, а маршрутная диагностика дает гибкость при проверке дополнительных точек. Для защитных систем отдельно проверяют всю цепочку действия уставки: датчик, согласующее устройство, контроллер, сигнализация или останов, регистрация события.
Датчики и измерительные каналы
| Датчик или элемент канала | Что измеряет | Когда полезен | Что учитывать |
|---|---|---|---|
| Вихретоковый датчик перемещения | Относительное перемещение вала, мкм | Подшипники скольжения, орбиты, радиальные зазоры, осевой сдвиг | Нужны правильный зазор, материал вала, калибровка и защита от помех |
| Акселерометр | Виброускорение, м/с² или g | Корпусная вибрация, подшипники качения, высокочастотные признаки | Критичны монтажная поверхность, момент затяжки и частотный диапазон |
| Датчик скорости | Виброскорость, мм/с | Общая оценка корпусной вибрации в среднечастотной области | Имеет ограниченный диапазон и зависит от ориентации установки |
| Тахометр или фазовая метка | Частоту вращения и фазу | Синхронный анализ, балансировка, гармоники 1X и 2X, орбиты | Нужна стабильная метка и корректная привязка к каналам вибрации |
| Лазерный виброметр | Бесконтактную вибрацию поверхности | Специальные измерения, испытания, труднодоступные зоны | Чувствителен к оптическим условиям и обычно не применяется как массовый стационарный канал |
| МЭМС-датчик | Ускорение, иногда с беспроводной передачей | Вспомогательный мониторинг, трудоемкие обходы, распределенные точки | Нужно проверять шум, дрейф, питание, частоту опроса и пригодность к диагностике |
| Кабели, согласующие устройства и модуль сбора | Передачу, преобразование и запись сигнала | Все стационарные системы, особенно вихретоковые каналы | Важны экранирование, маркировка, заземление, диапазон входов и контроль исправности цепи |
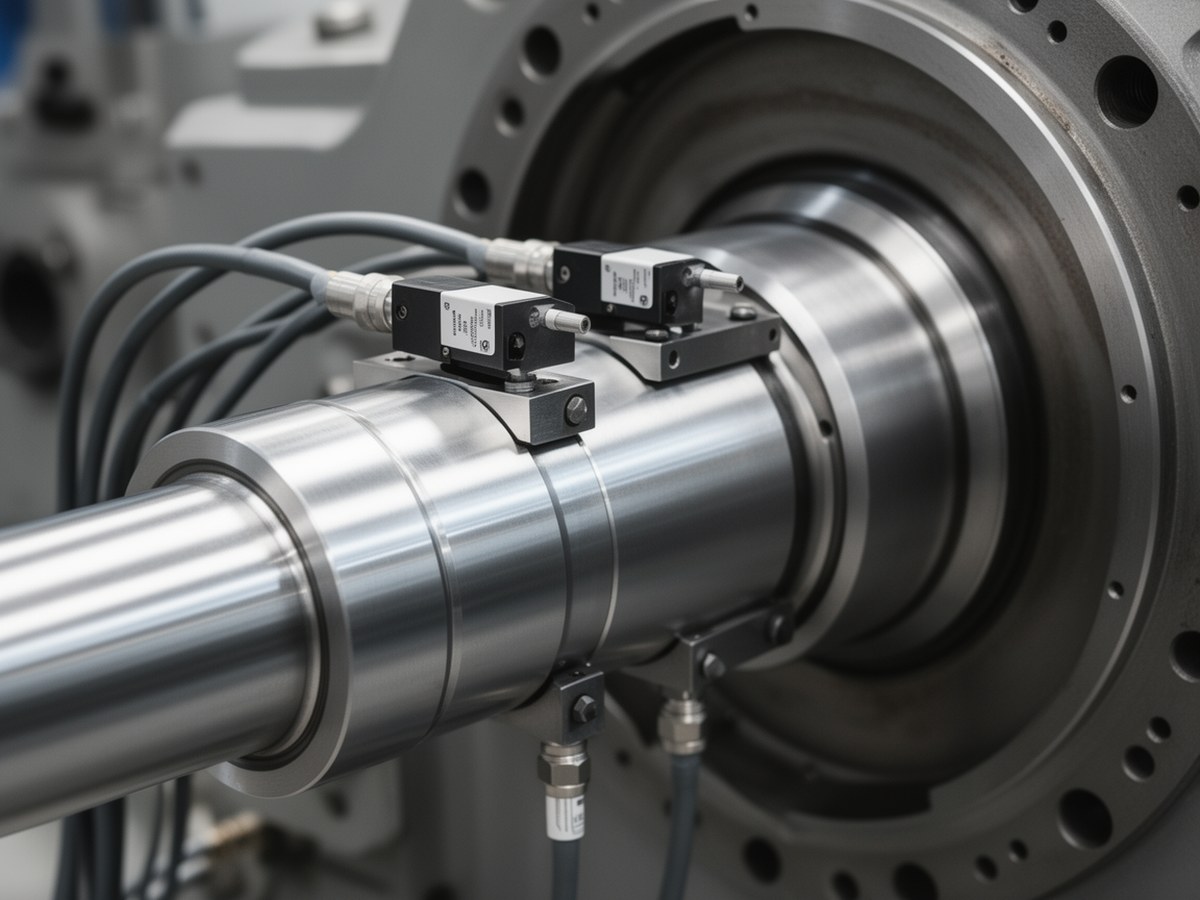
Контроль относительного перемещения
Изображение уместно рядом с описанием вихретоковых датчиков и измерительных каналов.
Размещение датчиков на длинных валах
Базовые точки контроля выбирают вблизи подшипниковых опор, потому что через опоры вал взаимодействует с корпусом и фундаментом. Для относительной вибрации в одной плоскости обычно ставят два радиальных бесконтактных датчика под углом 90 градусов. Такая пара позволяет оценивать не только амплитуду, но и траекторию движения вала, а также среднее положение его центра.
На корпусах подшипников датчики абсолютной вибрации ставят по основным направлениям: горизонтальному, вертикальному и при необходимости осевому. Осевой канал для перемещения вала размещают так, чтобы он надежно отслеживал положение ротора относительно упорного подшипника. Точки в пролете используют осторожно: на вращающийся вал датчик обычно не установить напрямую, а измерение корпуса вдали от опоры не всегда отражает форму прогиба ротора.
Ошибки монтажа часто дают более убедительный ложный сигнал, чем слабый реальный дефект. Проверяют ориентацию осей, зазор вихретокового датчика, качество посадочной поверхности, экранирование кабелей, температурные условия и совпадение маркировки каналов в системе сбора данных.
Анализ сигналов
Временной сигнал показывает пики, импульсы, нестабильность и переходные процессы. Общий уровень удобен для быстрой оценки состояния, но не объясняет причину вибрации. Спектр показывает частотный состав, тренд фиксирует изменение параметра во времени, а события пуска и останова помогают увидеть переход через критические скорости вращения, изменение фазы и формы орбиты.
Обозначение 1X означает частоту вращения, 2X обозначает удвоенную частоту, 0,5X указывает на субгармоническую составляющую. Для длинных валов важно смотреть не только амплитуду, но и фазу, изменение формы орбиты и поведение при разгоне или изменении нагрузки.
fr = n / 60
где fr обозначает частоту вращения, Гц; n обозначает скорость вращения, об/мин. Гармоники оценивают как k · fr, где k равно 1, 2, 3 или дробному значению для субгармоник.
v = 2πf · x; a = (2πf)2 · x
где x обозначает амплитуду гармонического перемещения; v обозначает амплитуду скорости; a обозначает амплитуду ускорения; f обозначает частоту, Гц. Если используются среднеквадратические или пиковые значения, все величины нужно приводить к одному типу представления. Поэтому одинаковое перемещение на разных частотах дает разную скорость и ускорение, а эти параметры нельзя сравнивать без учета частотного диапазона.
Δf = fs / N
где Δf обозначает разрешение спектра, Гц; fs обозначает частоту дискретизации, Гц; N обозначает число отсчетов. Частоту дискретизации выбирают с запасом относительно верхней частоты анализа, а длительность записи подбирают с учетом нужного разрешения по частоте.
Критические скорости и резонанс
Критическая скорость, или критическая частота вращения, это режим, при котором частота возбуждения совпадает с собственной частотой системы «вал, роторные массы, опоры, фундамент». В эксплуатации ее часто выражают в об/мин, а в расчетах собственные частоты задают в Гц; это разные формы описания одного ротодинамического явления. У длинного ротора может быть несколько критических скоростей вращения, соответствующих разным формам колебаний.
При переходе через критический режим растет амплитуда, меняется фаза, а орбита может становиться вытянутой или нестабильной. Поэтому пусковые и остановочные записи для длинных валов часто диагностически ценнее, чем одиночное измерение на установившейся скорости.
ncr ≈ 60 · f1
где ncr обозначает оценочную критическую скорость, об/мин; f1 обозначает первую собственную частоту модели ротора, Гц. Это приближение зависит от расчетной модели, жесткости опор, распределения масс, зазоров и граничных условий; для ответственных машин его проверяют расчетом ротодинамики и пусковыми измерениями.
Диагностические признаки дефектов
Частотные признаки в таблице типичны, но не являются абсолютными. Диагноз подтверждают по нескольким каналам, фазе, режиму работы, трендам, температуре, осмотру и данным ремонта. Одинаковая гармоника может появляться при разных причинах, особенно на длинных роторах с несколькими опорами.
| Дефект или режим | Типичные частотные признаки | Дополнительные признаки | Что проверить |
|---|---|---|---|
| Дисбаланс | Выраженная 1X | Стабильная фаза, рост при увеличении скорости | Балансировку, загрязнение, износ рабочих колес, изменение массы ротора |
| Несоосность | 1X и 2X, иногда осевая вибрация | Рост температуры муфты или подшипников, зависимость от нагрузки | Центровку, состояние муфты, тепловой рост агрегатов |
| Изгиб длинного вала | Чаще 1X, иногда сложная картина по опорам | Разные фазы на опорах, изменение формы прогиба | Монтаж, остаточный прогиб, режимы нагрева, историю ремонтов |
| Ослабление креплений | 1X, 2X, 3X, возможны субгармоники | Нестабильная амплитуда, ударные составляющие | Фундамент, анкеры, посадки подшипников, затяжку крепежа |
| Дефекты подшипников качения | Характерные подшипниковые частоты, высокочастотные импульсы | Рост пик-фактора, шума и локальной температуры | Смазку, зазоры, дорожки качения, сепаратор, состояние посадок |
| Трещина вала | 1X и 2X, изменение фазы, признаки при переходных режимах | Нестабильность при нагрузке, локальная асимметрия | Историю перегрузок, неразрушающий контроль, зоны концентрации напряжений |
| Масляный вихрь | Обычно около 0,42-0,48X | Характерен для подшипников скольжения, меняется с режимом смазки | Зазоры, вязкость и давление масла, температуру, геометрию вкладышей |
| Резонанс | Рост около собственной частоты | Резкое изменение фазы, сильная зависимость от скорости | Критические скорости вращения, жесткость опор, фундамент, режим разгона |
Уставки, базовые уровни и тренды
Предупредительные и аварийные уставки задают отдельно для разных параметров: перемещения, виброскорости, виброускорения, осевого сдвига, температуры и частоты вращения. Для защитной системы уставки должны быть однозначными и проверяемыми, потому что их превышение может привести к останову оборудования. Для диагностического мониторинга важнее тренды, скорость изменения и сопоставление каналов.
Базовые уровни записывают после исправного монтажа или ремонта при устойчивых режимах: холостой ход, номинальная нагрузка, разные скорости, прогрев. Если сравнивать данные без учета режима, можно принять нормальное изменение нагрузки за дефект или, наоборот, пропустить развитие повреждения. После ремонта, замены датчика, изменения фундамента или перенастройки фильтров базовые уровни пересматривают.
Ограничения и типовые ошибки
Вибромониторинг сам по себе не дает достоверного диагноза. Он показывает измеренную динамику, а вывод делают по совокупности признаков. Ложные срабатывания возникают из-за неверной ориентации датчиков, плохого контакта акселерометра с корпусом, электромагнитных помех, температурного дрейфа, ошибок калибровки вихретоковых датчиков и неправильного выбора фильтров.
Ошибки анализа обычно связаны с редкой дискретизацией, короткой записью для нужного спектрального разрешения, сравнением разных режимов и игнорированием фазы. Для длинных валов особенно опасно рассматривать каждую опору отдельно. Каналы нужно сопоставлять с соседними опорами, тахометкой и режимом машины.
Как внедряют систему мониторинга
Практический порядок начинается с обследования оборудования: схема ротора, типы подшипников, скорости, критические режимы, доступные места монтажа, требования защиты и перечень событий, которые нужно сохранять. Затем выбирают параметры и датчики вибрации вала, проектируют кабельные трассы, согласующие устройства, модуль сбора данных, контроллер защиты, архив трендов и обмен с АСУ ТП.
После монтажа выполняют проверку каналов, запись базовых уровней, настройку уставок и регламент проверки датчиков. Для критичных машин полезно отдельно сохранять пуск, останов, переход через критические скорости вращения, превышение уставок, изменение нагрузки и ремонтные вмешательства. Такой архив делает диагностику воспроизводимой.
Современные направления
Беспроводные датчики, предиктивная аналитика и цифровые модели расширяют возможности контроля, но не отменяют базовую метрологию. Беспроводной канал должен обеспечивать нужную частоту опроса, надежность передачи, синхронизацию времени и достаточный ресурс питания. Для быстрых переходных процессов и защитных функций такой канал применяют только после проверки задержек и потерь данных.
Алгоритмы прогнозирования требуют исторических данных, разметки событий и проверки на конкретной машине. Цифровая модель полезна только тогда, когда она связана с реальными режимами, конструкцией опор и подтвержденными измерениями.
Правильно организованный мониторинг начинается не с выбора программного обеспечения, а с инженерной задачи, модели машины, выбора контролируемых параметров, надежного монтажа и регулярной проверки измерительных каналов.