Направляющие с адаптивным предварительным натягом применяют в узлах линейного перемещения, где обычного заводского преднатяга недостаточно для стабильной точности во всем диапазоне режимов. Такая система изменяет усилие натяга между рельсом, кареткой и контактными элементами в зависимости от нагрузки, температуры, вибраций или команды контроллера.
- Предварительный натяг линейных направляющих нужен для устранения зазора и повышения жесткости.
- Чем выше натяг, тем больше контактная жесткость, но выше трение, тепловыделение и риск ускоренного износа.
- Адаптивный натяг целесообразен не всегда: в простых осях часто достаточно стандартной каретки с выбранным классом преднатяга.
- Проектирование направляющих с адаптивным предварительным натягом начинается с нагрузок и точности, а не с выбора датчиков или актуаторов.
Что такое адаптивный предварительный натяг
Предварительный натяг, или преднатяг, представляет собой заранее созданное внутреннее усилие в направляющей паре. В рельсовых системах оно возникает между дорожками качения, шариками или роликами и кареткой. В направляющих скольжения аналогичную роль может выполнять регулируемый прижим, клин, гидростатическая подушка или другой узел, уменьшающий зазор.
Задача преднатяга состоит в том, чтобы убрать люфт, повысить жесткость и сделать перемещение более предсказуемым. Но избыточный натяг повышает сопротивление движению, нагревает узел и увеличивает контактные напряжения. Поэтому в точных механизмах нужен баланс между жесткостью, трением и ресурсом.
Адаптивный предварительный натяг отличается тем, что усилие не остается постоянным. Система получает данные от датчиков, сравнивает их с уставкой и корректирует исполнительный элемент. Например, при резании или измерении натяг может быть повышен для жесткости, а при быстром холостом перемещении снижен для уменьшения трения.
Фиксированный, регулируемый и адаптивный натяг
| Подход | Как создается натяг | Преимущества | Ограничения | Где уместен |
|---|---|---|---|---|
| Фиксированный | Заводской подбор геометрии каретки, тел качения и дорожек | Простота, повторяемость, высокая надежность | Не подстраивается под износ, температуру и переменную нагрузку | Типовые станочные оси, линейные модули, механизмы с устойчивыми режимами |
| Регулируемый | Ручная настройка клином, эксцентриком, винтом, прижимной планкой | Можно компенсировать сборочные погрешности и часть износа | Требует обслуживания, настройка зависит от квалификации | Направляющие скольжения, ремонтируемые узлы, опытные конструкции |
| Адаптивный | Автоматическая коррекция через датчики, контроллер и исполнительный элемент | Может поддерживать нужную жесткость при изменении условий | Сложность, стоимость, риск отказов датчиков и актуаторов | Прецизионные приводы, координатные столы, робототехника, измерительные установки |
Где применяют такие направляющие
Адаптивный натяг оправдан там, где условия работы заметно меняются в пределах одного цикла или где малая ошибка позиционирования критична. В обычной транспортной оси или простом механизме подбора правильного класса преднатяга обычно достаточно.
Станки и обрабатывающие центры
Для осей, где чередуются силовое резание, быстрые перемещения и точное позиционирование.
Координатные столы
Для сборочных и технологических систем, где важны малые люфты, стабильность геометрии и повторяемость перемещений.
Прецизионные приводы
Для линейных осей с высокой точностью позиционирования, где изменение трения напрямую влияет на управление приводом.
Робототехника
Для механизмов с переменной ориентацией нагрузки, динамическими ускорениями и требованиями к компактности узла.
Измерительные установки
Для координатно-измерительных машин, оптических столов и испытательных стендов, где важна стабильность при малых перемещениях.
Конструкция системы
Система адаптивного натяга обычно включает базовую направляющую, каретку, узел создания усилия, датчики, контроллер и исполнительный элемент. Здесь разделяют два уровня проектирования: сначала выбирают тип направляющей по нагрузке, точности и ресурсу, затем оценивают, нужна ли активная регулировка натяга.
- Рельс и каретка. Несут нагрузку, задают траекторию перемещения и определяют базовую жесткость.
- Тела качения или поверхности скольжения. Передают усилия через контактные зоны, чувствительны к загрязнению, смазке и перекосам.
- Узел создания натяга. Формирует начальное и изменяемое усилие, например через клин, деформационный элемент или регулируемое давление.
- Датчики. Измеряют положение, деформацию, силу, температуру, вибрации или косвенные признаки нагрузки.
- Контроллер. Сравнивает измерения с уставкой и ограничениями, затем выдает команду на исполнительный элемент.
- Исполнительный элемент. Изменяет натяг в допустимом диапазоне и должен иметь безопасное состояние при отказе питания.
- Смазка и защита. Уплотнения, кожухи, чистая смазка и защита кабелей важны не меньше, чем сам алгоритм регулирования.
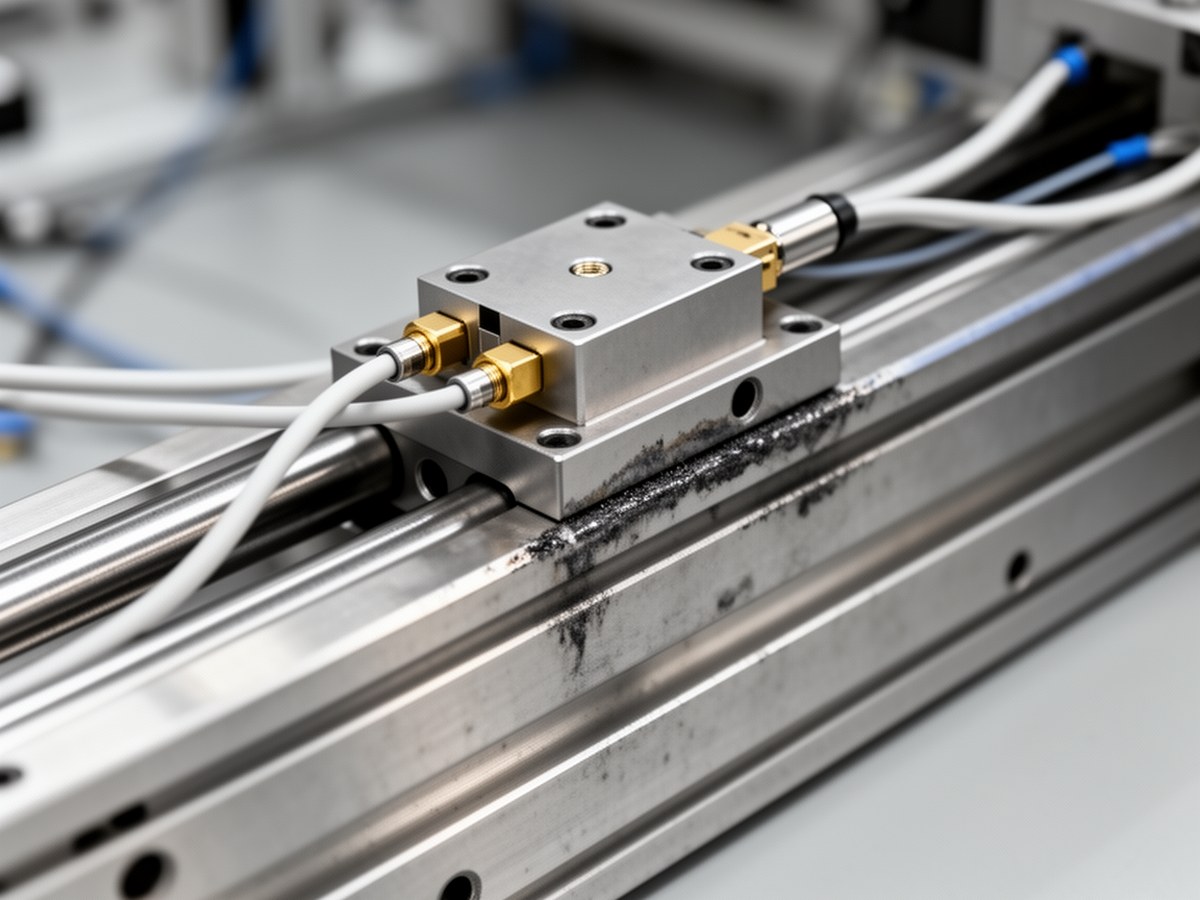
Размещение датчиков и исполнительных элементов
Изображение уместно после описания базовых узлов системы, перед разбором типов датчиков и актуаторов.
Типы направляющих и пригодность для адаптивного натяга
| Тип направляющей | Пригодность | Особенности проектирования |
|---|---|---|
| Профильные рельсовые шариковые | Средняя | Низкое трение и высокая скорость, но ограниченное пространство для встроенной регулировки. |
| Профильные рельсовые роликовые | Средняя или высокая | Хорошая жесткость и грузоподъемность, чувствительность к перекосам и чистоте сборки. |
| Направляющие скольжения | Зависит от исполнения | Клиновая, гидравлическая или пневматическая регулировка возможна, но требуется контроль смазки, тепла и износа. |
| Гидростатические и аэростатические | Зависит от системы питания | Зазор и несущая способность связаны с давлением среды; критичны чистота, стабильность давления и точность регулирования. |
| Миниатюрные направляющие | Ограниченная | Малый объем узла затрудняет размещение датчиков и исполнительных элементов. |
Датчики и исполнительные элементы
Датчики выбирают под конкретный регулируемый параметр: удержание жесткости, компенсацию температуры, контроль износа, подавление вибраций или защиту от перегрузки. Чем больше контуров измерения, тем выше требования к калибровке и диагностике.
| Элемент | Что контролирует или изменяет | Инженерные замечания |
|---|---|---|
| Датчик положения | Ошибка перемещения, люфт, отклонение от траектории | Полезен для обратной связи, но не всегда напрямую показывает силу натяга. |
| Датчик силы или деформации | Прижим, реакцию каретки, упругую деформацию корпуса | Требует стабильного монтажа и температурной компенсации. |
| Датчик температуры | Нагрев рельса, каретки, корпуса, привода | Нужен для длинных направляющих и прецизионных осей. |
| Датчик вибрации | Колебания, приближение к резонансным режимам | Позволяет ограничивать натяг или менять жесткость в отдельных режимах. |
| Ток привода | Косвенную нагрузку и рост трения | Удобен как дополнительный признак, но не заменяет прямые измерения. |
| Пьезоактуатор | Быстрое малое перемещение | Подходит для точной коррекции, но имеет ограниченный ход. |
| Клин, эксцентрик, электромеханический узел | Механическое изменение зазора или прижима | Относительно понятная конструкция, но есть риск заклинивания и люфта в механизме. |
| Гидро- или пневмоэлемент | Регулировку усилия через давление | Подходит для тяжелых узлов, требует герметичности, фильтрации и контроля давления. |
Алгоритм управления натягом
Базовая архитектура строится как контур обратной связи: датчик измеряет параметр, контроллер сравнивает его с уставкой, исполнительный элемент изменяет усилие, затем система снова проверяет результат. Кроме формулы регулирования задают ограничения: минимальный и максимальный натяг, скорость изменения усилия и безопасный режим при отказе.
- сигналы датчиков фильтруют, чтобы шум не вызывал лишние микроперемещения актуатора;
- максимальный натяг ограничивают по контактным напряжениям, нагреву и ресурсу;
- при недостоверных данных система переходит в безопасную уставку или останавливает ось;
- ошибки датчиков, перегрев, превышение тока привода и заедание актуатора должны фиксироваться диагностикой.
Адаптивный натяг не должен компенсировать ошибки базовой конструкции. Если рельсы установлены с перекосом, каретка перегружена моментом или загрязнение попадает в дорожки качения, алгоритм управления может только замаскировать проблему до ускоренного износа или отказа.
Упрощенная ПИД-модель показывает принцип коррекции натяга. Здесь Fp обозначает силу предварительного натяга, e(t) обозначает ошибку по выбранному параметру, Kp, Ki, Kd обозначают коэффициенты регулятора. На практике добавляют фильтрацию сигналов, ограничения хода актуатора и аварийные пороги.
Исходные данные для проектирования
Перед расчетом предварительного натяга направляющих фиксируют не только массу подвижного узла, но и весь набор условий, влияющих на контактную нагрузку и точность.
- масса подвижной части, полезная нагрузка и технологические силы;
- радиальные и боковые нагрузки, опрокидывающие моменты, число рельсов и кареток;
- скорость, ускорение, профиль движения и частота циклов;
- требуемая жесткость, точность позиционирования и допустимый люфт;
- температурный диапазон, тепловые градиенты и материал основания;
- загрязненность среды, требования к смазке, защите и обслуживанию;
- расчетный ресурс, допустимый нагрев и условия диагностики отказов.
Расчетные параметры при проектировании
Расчеты для адаптивного натяга используют как предварительные инженерные оценки. Они не заменяют данные производителя направляющей, проверку контактных напряжений, расчет ресурса, учет радиальных и боковых нагрузок, моментов на каретках и испытания опытного узла.
Оценка внешней нагрузки на каретку или группу кареток. m обозначает массу подвижной части, g ускорение свободного падения, a расчетное ускорение оси, Fproc технологическую силу, например усилие резания или прижима.
Оценка силы предварительного натяга на одну каретку. ks обозначает коэффициент запаса, n число кареток или расчетных опор. Формула применима только как первичное приближение: в реальном выборе используют каталожные расчеты по радиальным нагрузкам, боковым нагрузкам, моментам, ориентации оси и неравномерному распределению усилий между каретками.
Упрощенная связь предварительного натяга и контактной жесткости. K0 и F0 берут из расчетной или экспериментальной базовой точки. Степенная зависимость отражает нелинейность контакта, но не является универсальным нормативом.
Оценка силы трения при изменяемом натяге. μ обозначает приведенный коэффициент трения. Чем выше Fp, тем выше сопротивление движению и тепловыделение, поэтому алгоритм не должен держать максимальный натяг без необходимости.
Оценка температурного линейного расширения направляющей или основания. L0 обозначает исходную длину, α коэффициент линейного расширения материала, ΔT изменение температуры. Для длинных стальных рельсов даже небольшой температурный градиент может быть значимым для микронной точности.
Температура, вибрации и износ
Температура меняет геометрию рельса, каретки и основания. Если направляющая закреплена на материале с другим коэффициентом расширения, могут появиться дополнительные внутренние напряжения. Адаптивный натяг в таком случае полезен только при корректном размещении температурных датчиков и понимании тепловой модели узла.
Вибрации влияют на точность позиционирования и контактные условия. Повышение натяга может увеличить жесткость, но не всегда уменьшает вибрацию. Иногда рост жесткости смещает собственную частоту узла, а иногда повышает трение и нагрев. Поэтому настройку проводят по измерениям, а не по предположению, что больший натяг всегда лучше.
Износ постепенно меняет зазоры и распределение нагрузки. Адаптивная система может частично компенсировать эти изменения, но не отменяет регламент осмотра, смазки, очистки и проверки геометрии.
Ограничения и типовые причины отказов
| Риск | Как проявляется | Меры снижения |
|---|---|---|
| Дрейф калибровки | Система поддерживает неверное усилие при внешне нормальных показаниях | Периодическая поверка, контроль нулевых точек, сравнение независимых сигналов |
| Отказ датчика | Резкое изменение натяга, ложная перегрузка или отсутствие реакции | Диагностика достоверности, резервный датчик, безопасная уставка по умолчанию |
| Загрязнение дорожек | Рост трения, шум, локальные заедания | Уплотнения, защитные кожухи, чистая смазка, контроль среды эксплуатации |
| Заклинивание актуатора | Натяг не меняется или остается на опасном уровне | Ограничители хода, механический байпас, аварийный режим остановки |
| Избыточная сложность | Система дороже и менее ремонтопригодна, чем базовый узел | Сравнение с фиксированным и регулируемым натягом на этапе технико-конструкторской оценки |
Практический порядок выбора решения
- Определить нагрузки, моменты, скорость, ускорение и требования к точности.
- Выбрать тип направляющей и базовый размер по каталогам производителя.
- Проверить стандартные классы преднатяга, жесткость, ресурс и допустимый момент на каретку.
- Оценить, насколько режимы переменны: нагрузка, температура, вибрации, износ, частота переналадки.
- Если стандартного преднатяга недостаточно, рассмотреть регулируемый или адаптивный узел.
- Выбрать измеряемые параметры, датчики, исполнительный элемент и безопасную уставку при отказе.
- Проверить решение испытаниями: нагрев, трение, повторяемость, ресурс, реакцию на отказ датчика и загрязнение.
Когда адаптивный натяг не нужен
Если нагрузка стабильна, температура контролируется, а точность укладывается в требования при стандартном классе преднатяга, адаптивная система обычно не нужна. Фиксированный преднатяг проще, надежнее и легче обслуживается.
Регулируемый натяг выбирают, когда требуется ручная компенсация сборочных погрешностей, износа или особенностей направляющих скольжения. Это компромисс между простотой и возможностью настройки.
Адаптивный предварительный натяг рассматривают при сочетании нескольких факторов: переменные нагрузки, высокая точность позиционирования, длинные направляющие, заметные температурные изменения, требования к диагностике состояния и готовность усложнить конструкцию ради управляемости. В таких проектах сначала фиксируют расчетные режимы, допустимый диапазон натяга и критерии отказа, затем выбирают датчики, исполнительный элемент и алгоритм управления.