Оценка состояния подшипникового узла по вибрации применяется для раннего выявления деградации и планирования ТОиР. Ключ к достоверности: сопоставимый режим измерений и подтверждение вывода по нескольким индикаторам.
- Первичный контроль (скрининг) и поиск причины дефекта это разные задачи и разные уровни доказательности.
- Один пик в спектре не равен дефекту подшипника.
- Порог тревоги и тренд вибрации задают действие эксплуатации, а не только факт отклонения.
Что решает вибродиагностика подшипникового узла
Метод закрывает две задачи: 1) первичный контроль общего состояния машины по виброскорости RMS, 2) диагностика причины (root cause) по виброускорению, спектру и спектру огибающей подшипника.
Ограничение: вибрация не дает гарантированного описания геометрии повреждения. Для критичных узлов вывод подтверждают дополнительными данными: температура, смазка, ток, осмотр после остановки.
Подготовка измерений
Перед каждым замером обязательно фиксируйте режим: нагрузка, обороты, температура, состояние привода. Без этого тренды разных дат могут быть несопоставимы.
| Компоновка | Точки | Направления | Требование к повторяемости |
|---|---|---|---|
| 2-опорная горизонтальная | У каждой опоры у зоны подшипника | H/V/A | Постоянная точка, один и тот же способ крепления датчика |
| Консольная | Опора у рабочего органа и опора привода | H/V/A, приоритет радиальным | Фиксировать нагрузку и положение режима |
| Вертикальная | Верхняя и нижняя опоры | 2 радиальных + A | Отдельно отмечать влияние фундамента |
Протокол точки измерения (обязательные поля)
| Поле | Что записывать |
|---|---|
| Точка и направление | Код точки, H/V/A |
| Датчик и крепление | Тип акселерометра, шпилька/магнит |
| Режим | Обороты, нагрузка, температура |
| Тахосигнал | Есть/нет, источник |
| Дата и оператор | Метка времени и исполнитель |
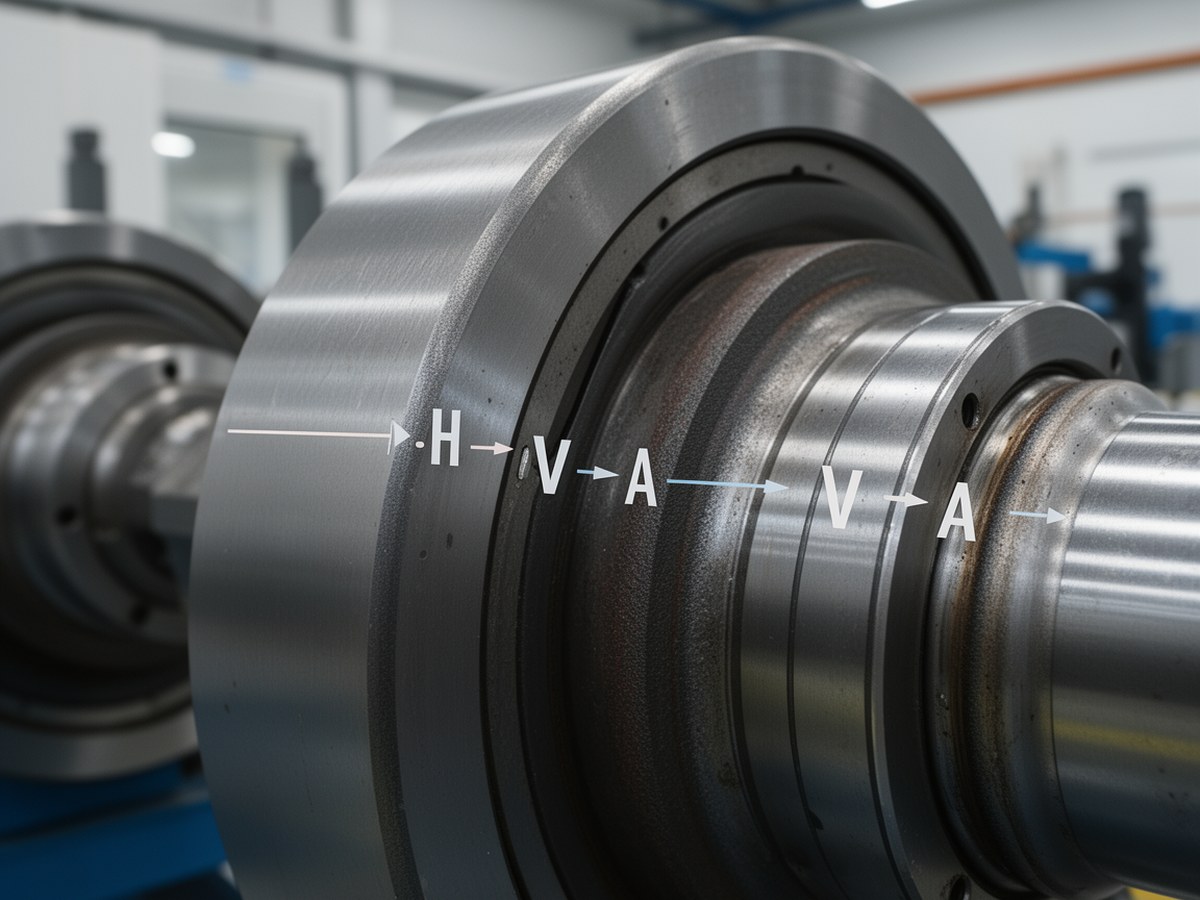
Точки и направления измерений
Иллюстрация помогает стандартизовать маршрутный и стационарный виброконтроль.
Сбор данных: минимально достаточный протокол
| Параметр | Практический диапазон | Назначение |
|---|---|---|
| Частота дискретизации | 25.6–51.2 кГц | Высокочастотные признаки дефектов |
| Длительность записи | 4–20 с | Устойчивость статистики и спектра |
| Окно FFT | Hanning | Снижение утечки |
| Перекрытие | 50–75% | Стабилизация оценки |
| Усреднение | 4–16 | Подавление случайного шума |
| Динамический диапазон | ≥80 дБ | Выделение слабых компонент |
| Тахо | Обязательно для диагностики | Привязка к оборотам, боковые полосы, order-анализ |
Маршрутный и стационарный виброконтроль выбирают по критичности: маршрутный дешевле, стационарный лучше для быстроразвивающихся дефектов.
Обработка сигнала
Базовые индикаторы состояния: RMS, peak, crest factor, kurtosis. Для переменной скорости предпочтительно сравнение в порядках (order-анализ), а не в фиксированных Гц.
Полоса демодуляции для спектра огибающей
Выбирайте полосу там, где есть устойчивая энергия ударных возбуждений подшипника и минимум вклада 1X/2X и сетевых помех. При сомнении проверяйте несколько полос и выбирайте наиболее повторяемую по тренду.
Признаки дефектов и их подтверждение
Характерные частоты подшипника BPFO BPFI BSF FTF рассчитывают по геометрии и частоте вращения:
Где f_r обозначает частоту вращения; n обозначает число тел качения; d обозначает диаметр тела качения; D обозначает диаметр окружности центров; θ обозначает угол контакта.
Короткий пример расчета
Если f_r = 25 Гц, n = 8, d/D = 0.30, θ = 0°, то FTF ≈ 8.75 Гц, BPFO ≈ 70 Гц, BPFI ≈ 130 Гц, BSF ≈ 39.8 Гц. В реальных данных используйте допуск по частоте из-за проскальзывания и режимных изменений.
Алгоритм верификации дефекта (3+ индикатора)
| Шаг | Проверка | Критерий перехода |
|---|---|---|
| 1 | Сопоставимость режима | Обороты/нагрузка/температура в допуске к прошлому замеру |
| 2 | Частотное совпадение | Есть линия у расчетной BPFO/BPFI/BSF/FTF с гармониками |
| 3 | Структура спектра | Есть боковые полосы, модуляция или семейство гармоник |
| 4 | Подтверждение в огибающей | Рост того же признака в спектре огибающей |
| 5 | Тренд | Устойчивый рост минимум в двух последовательных интервалах |
Решение: дефект подтвержден при выполнении шага 1 и минимум трех из шагов 2–5.
Стадии деградации и решения по ТОиР
| Статус | Операционные критерии | Действие |
|---|---|---|
| Наблюдать | Есть 1–2 признака, тренд нестабилен или режим несопоставим | Повторный замер в сокращенный интервал, проверка монтажа/смазки |
| Планировать замену | Сопоставимый режим + подтверждены ≥3 признака + рост тренда к порогу тревоги | Включить замену в ближайшее окно ТОиР |
| Останов | Быстрый рост широкополосного шума, ударный сигнал, потеря стабильности работы | Контролируемый или аварийный останов по регламенту безопасности |
Тренды и оценка остаточного ресурса
Оценку дают диапазоном, а не одной датой. Минимально обновляйте прогноз при каждом новом сопоставимом замере, для развивающегося дефекта чаще.
При смене нагрузки, оборотов, смазки или ремонта опоры модель пересчитывают заново.
Особые случаи
- Тихоходные узлы: больше опирайтесь на огибающую и длительные записи.
- Переменная скорость/нагрузка: применяйте order-анализ и тахопривязку.
- Частотные преобразователи: отделяйте электромагнитные компоненты от механических.
- Резонансные зоны: подтверждайте выводы дополнительными точками и фазовыми сравнениями.
Ограничения метода и ложные срабатывания
- Разбаланс и несоосность могут имитировать рост дефектных признаков.
- Ослабление крепежа и плохой монтаж датчика искажают RMS и ВЧ-область.
- Внешняя вибрация и резонанс конструкции дают ложные пики.
- Без тахо и без сопоставимого режима риск ошибочного диагноза резко растет.
Нормативная база
| Документ | Назначение |
|---|---|
| ISO 20816 (серия) | Оценка вибрации машины в целом по измерениям на невращающихся частях. Это не прямые «нормы подшипника» и не критерий типа дефекта. |
| ISO 13373-1 | Практика вибромониторинга и диагностики: измерения, обработка, интерпретация. |
| ISO 13379-1 | Общие принципы анализа диагностических данных и принятия решений. |
| ГОСТ, гармонизированные с ISO | Локальные требования к процедурам контроля, отчетности и внедрению. |
Итог: надежная диагностика подшипников качения по вибрации строится на повторяемости измерений, совокупности признаков и прозрачных правилах перехода к действиям ТОиР.