Демпфирование в линейной оси это управляемое рассеивание энергии колебаний. Практический результат, снижение резонансных пиков и ускорение затухания без выхода по нагреву, износу и энергопотреблению.
Коротко главное
- Метод выбирают по источнику вибрации, рабочему диапазону частот и ограничениям по нагреву, ресурсу и обслуживанию.
- Преднатяг, демпфирующий слой и локальные демпферы чаще дают лучший результат в сочетании, чем по отдельности.
- Решение подтверждают только по воспроизводимым измерениям: impact, sweep, FRF, температура, ток оси и повторяемость.
Что такое демпфирование в линейных направляющих
Демпфирование это уменьшение амплитуды колебаний после возмущения. В узле направляющих его не сводят только к трению, важны также внутренние потери материалов и конструктивные механизмы рассеивания энергии.
Демпфирующий слой это слой материала, который повышает потери энергии при циклической деформации. Термин «демпферный слой» используется как синоним только при первом упоминании.
Физическая модель и метрики оценки
m, приведенная масса, c, вязкий эквивалент потерь, k, жесткость, F(t), возмущение.
Мини-глоссарий: ζ, коэффициент демпфирования линейных направляющих, δ, логарифмический декремент колебаний, Q, добротность, FRF, частотная характеристика линейной направляющей (отношение отклика к возбуждению по частоте).
Границы одномассовой модели
Модель 1-DOF применяют как первый шаг в узкой полосе около доминирующей моды. Переход к модальному/MDOF-анализу нужен, если есть несколько близких пиков, выраженная связь осей или заметное расхождение FRF между точками измерения.
Источники вибраций и рабочие диапазоны частот
| Источник | Диапазон | Что видно в спектре | Предпочтительные меры |
|---|---|---|---|
| Удар, реверс, вход инструмента | Широкополосно | Импульс и затухающий хвост | Локальные демпферы, демпфирующий слой, умеренный рост преднатяга |
| Периодика привода | Дискретные гармоники | Линии на кратных частотах | Тюнинг управления, контактная геометрия, баланс масс |
| Собственные формы конструкции | Десятки-сотни Гц | Узкие резонансные пики FRF | Структурное демпфирование, интегрированные демпферы |
| Нестабильный контакт, загрязнение | Низкие/средние частоты | Рост шумового фона, дрожание | Смазка, защита от абразива, корректировка преднатяга |
Методы повышения демпфирования линейных направляющих
| Метод | Ожидаемый эффект (при каких режимах) | Влияние на жесткость | Ограничения | Обратимость/ремонтопригодность |
|---|---|---|---|---|
| Материалы с более высокими потерями | Чаще средний, широкополосный, зависит от геометрии и нагрузки | Возможен компромисс по модулю | Цена, масса, технологичность | Низкая (обычно конструктивная замена) |
| Контактная геометрия дорожек | Средний в целевых резонансных зонах | Часто рост локальной контактной жесткости | Требовательность к изготовлению и юстировке | Средняя (через сервис/пересборку) |
| Демпфирующий слой | От локального до высокого в заданной полосе частот | Возможна добавочная податливость | СОЖ, абразив, термостарение, адгезия | Высокая (перенанесение/замена в сервисе) |
| Интегрированные демпферы | Выраженный эффект при настройке под конкретную моду | Зависит от схемы | Обслуживание, стоимость, деградация среды | Средняя/высокая (узловая замена) |
| Повышение преднатяга | Обычно заметно в низко-средней полосе и около рабочих мод | Обычно растет | Нагрев, износ, рост тока/мощности | Высокая (регулировка обратима) |
Преднатяг как основной настраиваемый параметр
Операционно используют уровни производителя: Low (минимальное трение), Medium (баланс), High (максимальная жесткость/демпфирование в допустимых пределах). Абсолютные значения зависят от серии направляющих и режима.
- Зафиксировать базу: FRF, температуру каретки, RMS/пик тока оси, точность позиционирования.
- Повышать преднатяг ступенчато (обычно по соседним каталожным уровням, без «скачка через класс»).
- После каждого шага повторять один и тот же цикл движения и измерений.
- Остановиться, если улучшение пика FRF/δ становится меньше, чем рост температуры и тока.
Практические пороги остановки задают относительно базы: устойчивый рост температуры узла, рост тока оси и ухудшение микроподач. Конкретные лимиты берут из паспорта направляющей, привода и теплового бюджета машины.
Практика измерений: FRF линейной оси и воспроизводимость
Минимальный набор: IEPE-акселерометр (или MEMS с подтвержденной полосой), инструментированный молоток/возбудитель, единая схема крепления датчика.
- Оси: измерять минимум по X/Y/Z, где Z обычно нормаль к монтажной плоскости направляющей.
- Точки: датчик на каретке у зоны нагрузки и на опоре, чтобы разделить локальные и структурные моды.
- Крепление: предпочтительно шпилька, магнит и клей использовать только с фиксацией в протоколе.
- Окно и усреднение: одинаковое окно (например Hanning) и не менее 4-8 усреднений на точку.
- Повторы: минимум 3-5 повторов при одинаковой температуре, смазке и закреплении.
Типовые ошибки: смена способа крепления датчика между сериями, разные точки удара, разный прогрев оси, сравнение результатов при разных профилях движения.
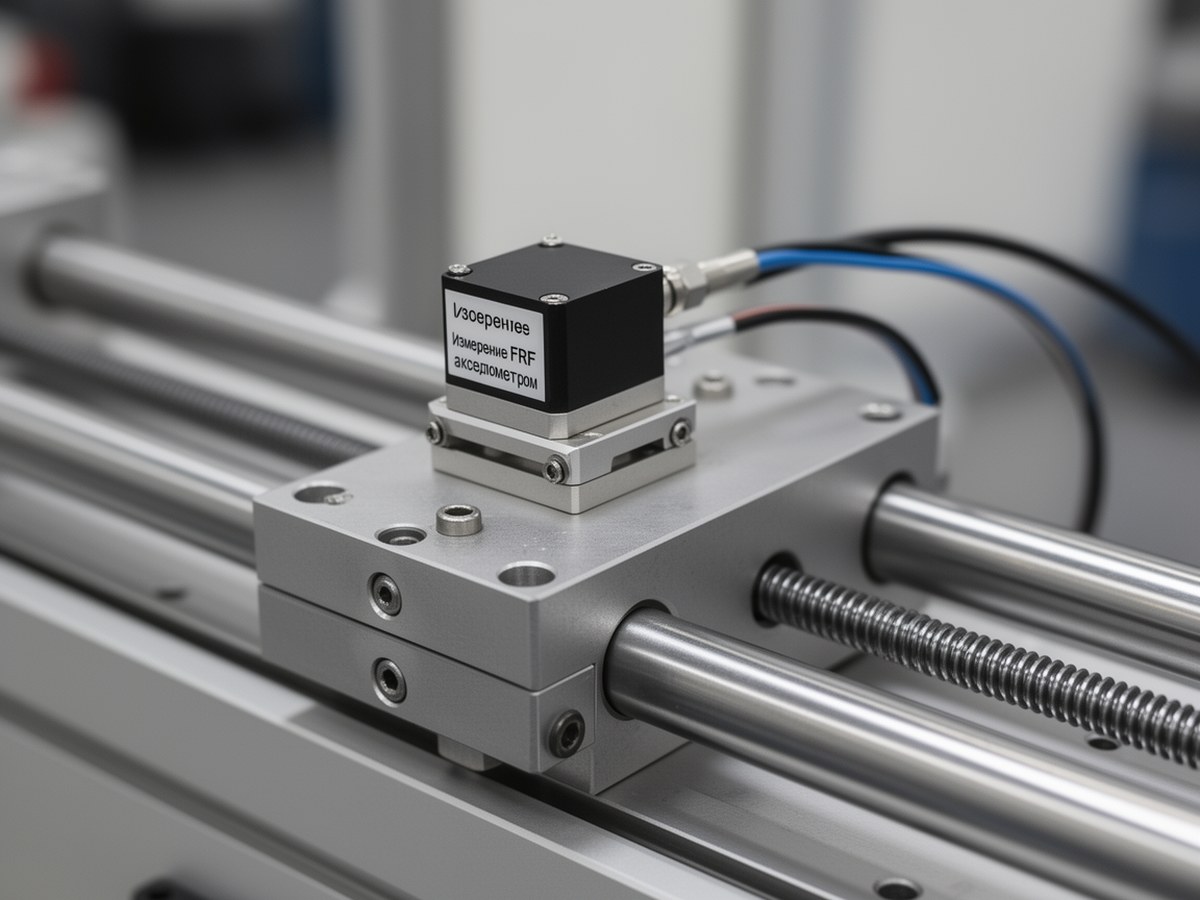
Установка датчика на каретке
Иллюстрация к требованиям по осям, креплению и повторяемости измерений.
Карта применимости по частоте и среде
| Полоса частот | Что обычно работает | Ограничения среды |
|---|---|---|
| Низкая | Преднатяг, смазка, коррекция управления | Риск перегрева при чрезмерном преднатяге |
| Средняя | Демпфирующие слои, контактная геометрия, локальные демпферы | СОЖ и абразив влияют на ресурс слоя |
| Высокая | Локальные/интегрированные демпферы, снижение возбуждения источника | Термостабильность материалов и крепежа критична |
Мини-кейсы KPI до/после
| Система | Изменение | Пик FRF | Время затухания | Температура/мощность | Повторяемость |
|---|---|---|---|---|---|
| Станок, высокоскоростная ось | Medium→High преднатяг + локальный демпфер | Снижение в целевой моде | Сокращение | Умеренный рост, в допуске | Стабильная |
| КИМ | Слой в защищенной зоне + тонкая настройка преднатяга | Снижение без новых пиков | Сокращение | Без существенного роста | Улучшена |
| Робототехническая ось | Демпфер в резонансном узле | Локальное снижение | Сокращение | Незначительное влияние | Стабильная |
Итог
Эффективные методы повышения демпфирования линейных направляющих выбирают по цепочке: источник вибрации, рабочая частота, ограничения среды и ресурса, затем обязательная верификация FRF и эксплуатационных KPI. Универсальных процентов эффекта без условий испытаний не существует.